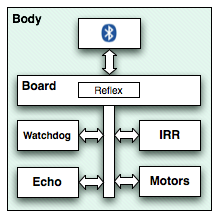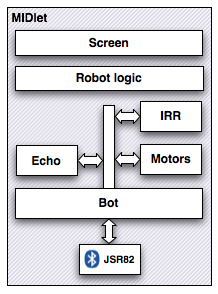
Elements of robot hardware on Java side are represented by driver objects. The state of each driver object is updated by corresponding hardware element via Bluetooth. Once an object state is changed the object communicates the change with its observers if any. Driver objects also provide methods which allow to alter the state of corresponding hardware elements.
A robot logic implementation instantiates driver objects of involved hardware elements and adds itself as an observer to driver objects. Once initialization phase is completed, the robot logic acts on state change notifications.
User input / output related part of the code if present also may be added as an observer to driver objects.